

- Як це працює?
- Несподівані проблеми і несподівана допомога
- Приклади автономного транспорту: реальні і не дуже

2015-й роки ми почали з теми електромобілів як найближчого майбутнього. Але є ще один напрямок розвитку транспорту, яке може перевернути світ чи не крутіше, ніж електромобілі - це автономний транспорт. Сьогодні такі машини виглядають прибульцями з далекого майбутнього, але реально знаходяться на відстані лише кількох років. І ось чому ...
Автономний транспорт - поняття дуже широке: починаючи від системи допомоги при парковці (приватна стоянка автомобіля) і закінчуючи автомобілем, який самостійно проїжджає весь шлях «з точки А в точку Б» - все це автономний транспорт. Перший варіант реалізований вже сьогодні: автоматична парковка, утримання автомобіля в своїй смузі на дорозі, адаптивний круїз-контоль, який вміє розганяти й гальмувати автомобіль - всі ці функції вже можна зустріти в автомобілях навіть середнього класу, і для них вже існує свій термін «часткова автономність ».
А ось «повна автономність» - коли автомобіль сам їде з точки А в точку Б - набагато складніше в реалізації. Однак повністю автономний транспорт дає стільки переваг, що його розробкою обов'язково слід займатися. Наприклад:
- радикальне скорочення ДТП - сьогодні більше 90% аварій відбуваються з вини водія;
- зменшення завантаження доріг - автомобілі можна змусити їхати ближче один до одного;
- звільнення часу для водія - можна читати, відпочивати, спілкуватися з друзями;
- зниження витрати палива - завдяки оптимізації стилю їзди, що недосяжно для водія-початківця або агресивного стилю водіння; і т.д.
Автономний транспорт через кілька років повинен виявитися там, де сьогодні знаходяться електромобілі: нехай ще не широка популярність, але вже реальність і доступність для звичайного покупця. Зверніть увагу - на фото Nissan Leaf перетинаються дві найсучасніші технології в світі автомобілебудування: електричний привід і автономне управління
Також важливо відзначити, що повністю автономний транспорт існує вже кілька років, проводилися гонки подібних машин в пустелі і по імітації міста. Але все це одиничні екземпляри. А ринок зацікавить автономний транспорт, який може їздити в автоматичному режимі практично завжди і всюди, але при цьому буде коштувати аналогічно або лише трохи дорожче звичайних машин. Тобто до 2020 року автономний транспорт повинен виявитися там, де зараз електромобілі - нехай ще не масовий прихід на ринок, але вже досить помітний сегмент; є кілька варіантів, є конкуренція; ціна рішення порівнянна зі схожими звичайними машинами. А по-справжньому масовим автономний транспорт повинен стати до 2025-2030 року.
Можна до хрипоти в горлі заявляти, що «я хочу їздити сам», але від цього нікуди не дітися: автономний транспорт - це одна з найближчих глобальних цілей у розвитку транспорту взагалі, на рівні важливості приходу електромобілів, якщо не більше.
Як це працює?
Давайте розберемося, як працює автономний транспорт. Умовно всі функціональні елементи можна розділити на три частини, пов'язані між собою єдиним ланцюжком: дослідження інформації навколо автомобіля + обробка та прийняття рішення + виконання цього рішення. З останнім пунктом все просто вже сьогодні: електричний підсилювач керма дозволяє повертати автомобіль вправо-вліво як завгодно; електро-дросель і АКПП дозволяють розганяти автомобіль; електроніка в управлінні гальмами (ABS, ESP, автоматичний «ручник») дозволяє уповільнювати і зупиняти автомобіль. З приходом електрокарів реалізація команд і управління автомобілів стає ще простіше. Наступне - за обробку і прийняття рішень відповідає «електронний мозок» системи: раніше це були кілька блоків, але сьогодні все йде до більш правильного рішення з одним блоком (приклад Audi, див. Нижче).
У спрощеному уявленні автономний транспорт - це далекобійний радар спереду та датчики кругового огляду навколо автомобіля ...
Зазвичай при розмові про автономність масу уваги приділяють саме першого блоку - всім системам, які бачать, що відбувається навколо автомобіля. Традиційний набір виглядає так: лідар (лазерний радар) + звичайні сенсори (як партнонік) + камера (візуальне сприйняття інформації) + GPS-прив'язка до електронних карт + хмарний сервіс та спілкування з іншими автомобілями. Але якщо копнути глибше ...
Наприклад, можна розглянути досвід компанії Volvo в створенні автономного транспорту, де шведи, мабуть, одні з лідерів ринку. В автомобілях, розроблених і побудованих за проектом «Drive Me», використовується: лазерний сканер в передній частині автомобіля - для виявлення об'єктів далеко (дальність 150 м, обхват 140 градусів); три камери з різним охопленням (34, 45, 140 градусів) в єдиному блоці у лобового скла - для візуального сприйняття інформації і вимірювання відстані до нього; радари далекої дії в кутах заднього бампера - для виявлення об'єкта ззаду при необхідності перестроювання з ряду в ряд; радари в кутах всіх бамперів і 4-е камери по периметру автомобіля - для створення точної картинки кругового огляду на 360 градусів; 12 датчиків по периметру - для створення картинки і виявлення об'єктів навколо автомобіля під час паркування (пішохід переходить дорогу за машиною). І це лише датчики і радари, але ж є ще й нюанси GPS-карти або роботи хмарного сервісу. Наприклад, Volvo розробляє т.зв. «3D GPS карту», де звичайна оцифрована карта місцевості доповнена 3-осьовим акселерометром і гіроскопом з 3-ма ступенями свободи. Разом автомобіль отримує інформацію не тільки про те, куди він їде відповідно до карти, але і розуміє, що він їде з прискоренням (спускається з гірки) і з невеликим поворотом, наприклад, вправо. Плюс додайте до цього можливості хмарних сервісів, де машини постійно спілкуються між собою і можуть заздалегідь попередити про ожеледь або ДТП на дорозі. частина технологій вже була описана в наших статтях про Volvo .
... але компанія Volvo показує, що насправді не все так просто в контролі навколишнього оточення навколо автомобіля: одним лазером і парою датчиків ніяк не обійтися
Очікувано, що обсяг даних, який потрібно обробляти автономному транспортному засобу в реальних умовах (а не на штучному полігоні) просто величезний. Причому логічна ланцюжок «отримання сигналу - обробка і рішення - команда на виконання» цілком може проходити по різних каналах і система, які не перетинаються між собою. Перший автономний транспорт мав так багато різних комп'ютерів і блоків для обробки сигналів і прийняття рішень, що вони займали чи не весь багажник автомобіля. Вирішення цієї проблеми - в об'єднання всіх систем (і датчиків для отримання сигналу, і виконавців команд) в єдиному блоці управління. Подібне рішення вже зараз опрацьовує компанія Audi (в партнерстві з Delphi, NVidia, і іншими компаніями) в своєму блоці управління zFAS. Уже сьогодні блок zFAS має розміри порівнянні з планшетом, расширяемую архітектуру, багатоядерний процесор. Цей блок можна використовувати для різних цілей і управління різними системами автомобіля, але саме тема автономного транспорту стала першопричиною його розробки - і саме для управління автономним транспортом блок zFAS і розроблявся в першу чергу. Ідея вже є, вона втілена в реальність, однак серійного випуску zFAS слід очікувати лише через кілька років.
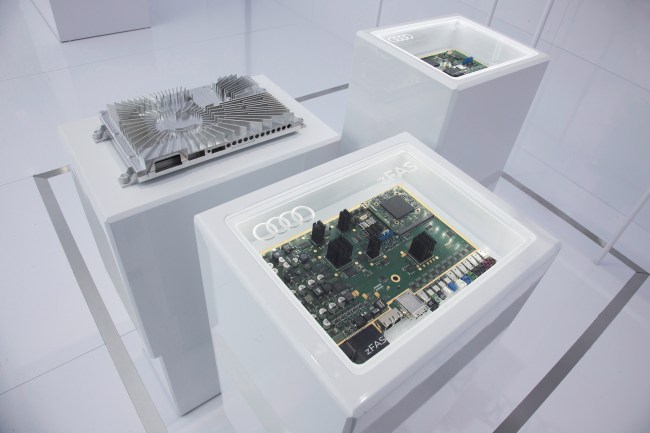
Блок zFAS може обробляти інформацію з 22-х датчиків, включаючи і лазерний радар, обробляти дані, і віддавати команди виконавчим механізмам (газ, гальмо, поворот)
А які ще проблеми чекають автономний транспорт? І що можемо йому допомогти?
Несподівані проблеми і несподівана допомога
Автономний транспорт - це наступний виток, наступна епоха розвитку взагалі. Як і завжди в подібних випадках, виникають проблеми не тільки з самою ідеєю і її втіленням, а й з навколишньою дійсністю.
Наприклад, одна з головних проблем - юридична відповідальність в разі ДТП. До сих пір не ясно, хто буде відповідати за сталася аварію. Водій - за те, що не взяв керування в свої руки в критичний момент? Виробник автомобіля - за те, що не «навчив» машину гальмувати або об'їжджати перешкоду? А може розробник ПЗ - адже, фактично, саме він і повинен був «вчити» автомобіль? Або інтернет-провайдер - за те, що не забезпечив належну швидкість передачі даних і автомобіль вчасно не дізнався з «хмари», що через 2 км на нього чекає зледенілий поворот? Сьогодні тільки в декількох штатах США дозволено використання автономного транспорту і то за умови, що за кермом автомобіля буде знаходитися досвідчений водій, який пройшов відповідну атестацію, що має певний допуск, і т.д.
Наступна проблема - швидкість оновлення карти GPS і реальної ситуації на дорозі. Як автомобіль повинен знати, що ще вчора по одній дорозі можна було проїхати, а вже сьогодні вона закрита на ремонт? Частково цю проблему можуть вирішити хмарні сервіси і обмін інформацією між автомобілями. Але тут виникає питання швидкої передачі даних і наявності інтернету «завжди і скрізь».
Автономний транспорт сильно «зав'язаний» на GPS-карти і хмарні сервіси, а тому дуже важливий швидкий інтернет - для оновлення карти і отримання інформації про стан дороги, ремонтах, об'їздах і т.д.
Ще одна проблема - психологія водіїв. Наприклад, компанія Google при тестуванні своїх прототипів виявила, що вони їдуть занадто м'яко, плавно, акуратно. Реальні водії віддають перевагу більш активний стиль водіння. Це стало проблемою, наприклад, при необхідності виїзду з другорядне дороги на головну (потрібно швидко розігнатися і уклиниться в потік) і при перестроювання з ряду в ряд. Сьогодні Google змушує свої тестові автономні машини їздити активніше, але в майбутньому, швидше за все, буде декілька режимів їзди на вибір водія. Ще один нюанс: а куди водієві подіти руки? Адже у звичайній машині кермо використовується не тільки як орган управління, а й як точка опори для рук.
Також існує проблема тестування автономного транспорту. Наприклад, компанія Nissan ще в 2014 році почала будівництво спеціального полігону для тестів автономного транспорту. Схожий полігон створила і компанія Volvo, плюс в Китаї запущена програма China FOT по дослідженню психіки і поведінки водія в різних ситуаціях - ці дані стануть в нагоді і для створення автономного транспорту. Тема автономного транспорту вже просувається не тільки компаніями, але і на рівні державних адміністрацій: у Німеччині триває активна робота зі створення першого автобану для автономного транспорту; уряд Великобританії думає над зміною і спрощенням законів (ПДР), щоб залучити дослідників автономного транспорту; в США вже існує практика допуску автономного транспорту на звичайні дороги при виконанні ряду умов (див. вище).
І подібна допомога «звідки не чекали» приходить знову і знову. Так, широке поширення електрокарів істотного спрощує управління в циклі «розгін-гальмування». Не дивно, що компанія Nissan будує свої автономні машини саме на базі електрокара Leaf. Але ще більш цікаві інші напрацювання Nissan. Наприклад, «досвід риб і бджіл». Розробники Nissan звернули увагу та поведінку тварин і їх взаємодію один з одним: дуже цікавим виявився досвід вивчення поведінки риб і очі джмеля. В результаті була створена система EPORO (EPisode 0 Robot), в якій використовується система лазерного виявлення (LRF), створена з урахуванням будови складеного очі джмеля з кутом огляду більше 300 градусів. У той же час шість модулів EPORO обмінюються даними один з одним для контролю перешкод і запобігання зіткнень з перешкодами або об'єктами, що рухаються поруч в групі або окремо - аналогічно руху риб в зграях.

Nissan працює з теорією «риб і бджіл», співпрацює з NASA, будує свій полігон для тестування автономних машин - в новому і незвіданому справі гарні будь-які способи, які дозволяють рухатися вперед
Як заявляють розробники Nissan «рух риб підпорядковане трьом правилам: чи не зміщуватися занадто сильно в сторону, не зменшувати дистанцію нижче певної межі і не стикатися з іншими рибами. Користуючись цими правилами, вони рухаються в зграях, причому зграї переміщаються без використання будь-якої розмітки, але риби пливуть на дуже малих відстанях один від одного. Тому, якщо автомобілі зможуть рухатися в групах за таким алгоритмом, то при незмінній ширині проїзної частини на ній буде міститися більшу кількість автомобілів. Це дозволить збільшити обсяг транспортних потоків без утворення заторів і ДТП ».
Додайте до цього спільну роботу Nissan і NASA в області створення нового інтерфейсу управління «людина-машина» (згадайте: немає керма - де подіти руки?) І розробку необхідного програмного забезпечення. Знову допомогу прийшла «звідки не чекали». Але прийшла.
Приклади автономного транспорту: реальні і не дуже
Тепер давайте розглянемо кілька прикладів автономного транспорту - як теорія працює на практиці.
Почнемо з проекту Apple Titan, який «голосно, але випадково» з'явився на початку цього року ( ми вже про нього розповідали ). Одна з важливих складових майбутнього «яблучного електромобіля» - його автономність. Однак коли саме створення електромобіля є лише чутками і припущеннями, що вже говорить про систему автономного управління.
Набагато ближче до реального створення автономного транспорту коштує прямий конкурент Apple - компанія Google, яка вже кілька років експериментує з автономним транспортом. Так, компанія Google працювала з Toyota і будувала свої машини на базі Toyota Prius і Lexus RX; розробила власний Google-мобіль у вигляді 2-місцевої капсули; зустрічалася інформація, що Google хотіла викупити компанію Tesla. Словом, компанія Google вкотре більше працює над ПО, ніж над конкретним втіленням ідеї «в залізі». І в цілому стратегія Google правильна в тому, що компанія розробляє рішення і, можна не сумніватися, що в майбутньому буде адаптувати його для всіх і для кожного. Швидше за все, що «автономність від Google» для автомобілів стане тим же самим, що і ОС Android для смартфонів - подібне рішення влаштує всіх: і розробника ПЗ, і виробників автомобілів (особливо, якщо можна буде створити свої надбудови над системою, подібно фірмовим оболонок над Android).
Перша поїздка автономної машини Google. Причому це навіть не машина, а більше «капсула» для міських переміщень. Перша партія з 100 Google-карів повинна виїхати на реальні дороги вже до 2017 року. Напевно компанія буде використовувати їх для відпрацювання логіки руху в місті - це найскладніше завдання для автономного транспорту
Наступний приклад випливає з зв'язку з Google - це електромобіль Tesla Model S. Складіть докупи кілька факторів: Tesla претендує на звання самого інноваційного автомобіля і намагається всіляко це показати; можлива покупка Google компанії Tesla (значить придивлялися і вивчали один одного); вже існуюча функція «автопілот». Компанія Google розраховує представити повністю автономний транспорт навіть раніше знакового 2020 року - орієнтовно вже в 2017 році. Приблизно до цього часу можна очікувати і помітного поновлення Tesla Model S (не просто апгрейд ПЗ, а й технічні зміни) - не здивуюся, якщо «повна автономність» від Google вперше з'явиться саме на новій версії Tesla Model S.
На тлі таких імен як Apple, Google, Tesla - передові комп'ютерні компанії та електричні технології - здається, що традиційні автовиробники безповоротно відстали. Але це не так, багато компаній ведуть свої розробки автономного транспорту.
Компанія Volvo розробляє проект Drive Me незалежно від моделі автомобіля - це може бути і новітній XC 90 (на фото вище) і вже відомі моделі S60 або V60: можна не сумніватися, що шведи можуть навчити їздити в автоматичному режимі будь-який з своїх автомобілів
Перш за все, мова йде про компанії Volvo, Nissan, Audi, BMW. Так, Volvo кілька років працює над проектом «Drive Me» в рамках якого компанія хоче створити повністю автономну машину. Перші екземпляри вже їздять по дорогах, а до 2017 року Volvo розраховує випустити на дороги 100 повністю автономних автомобілів. Причому, увагу, випустити 100 автомобілів на звичайні дороги, в реальний світ, реальний місто, реальну трасу. Компанія Volvo ставить перед собою дуже амбітне завдання, яка звучить як «безвідмовна система»: якщо в екстреному випадку передбачається, що автономний транспорт буде кликати на допомогу водія, то Volvo хоче створити автомобіль, який навіть в екстреній ситуації буде вести себе правильно. І тільки в тому випадку, якщо система зовсім не може впоратися з ситуацією, а водієві стало погано - автомобіль сам підрулити і припаркується на узбіччі.
Компанія Nissan веде роботу над проектом «Autonomous Drive», в рамках якого були створені автономні Nissan Leaf і проходять всі напрацювання, описані вище ( «досвід риб і бджіл», робота з NASA). Ще в кінці 2013 року перші автономні Nissan Leaf вже їздили по дорогах. Сьогодні автономний транспорт від Nissan вміє самостійно берегти свою смугу, перебудовуватися і ряду в ряд, виїжджати і заїжджати в потік автомобілів, проїжджати кругові розв'язки, виконувати обгін, та ін.
Audi тісно працює з Delphi і іншими компаніями над створенням автономного транспорту, і вже домоглася в цьому певних успіхів. Так, в плюси Audi, крім блоку zFAS, можна записати і довжелезний (5 633 км) пробіг на автономному Audi SQ5
Наступний приклад - компанія Audi, яка працює в партнерстві з Delphi (великий виробник і постачальник автомобільних компонентів) і іншими компаніями. Уже сьогодні існує кілька автономних прототипів Audi, які за останній час проїхали відразу кілька подорожей, переважно в автономному режимі. Перша серійна автономна модель від Audi повинна з'явитися приблизно в 2017 році (нова Audi A8), але спочатку мова йде про автономність в пробці: автомобіль зможе рухатися сам на швидкості до 16 км / ч, маневрувати, зупинятися і т.д. Після цього очікується підвищення швидкості до 60 км / год; потім - підвищення швидкості автономної їзди майже до максимальної швидкості автомобіля.
Інші німецькі преміум-бренди також намагаються не відставати. Компанія BMW вже давно працює над створенням автономного транспорту - і самостійно, і в партнерстві з іншими компаніями (наприклад, концепт Rinspeed Budii). Мало того, фірма BMW як «динамічний бренд», навіть навчила свої автономні машини їздити в бічному заметі без участі водія ...
Цікаво, що електронна система сама може вести автомобіль в бічному заметі. Але який у цьому сенс? Адже весь «фан» від занесення якраз в тому, що «дивіться, як я вмію!»
А компанія Mercedes недавно показала концепт F015 , Де автономність є однією з головних родзинок. Словом, процес йде і рухає його не одна компанія, а багато лідерів своїх областей - і інноваційні комп'ютерні компанії, і відомі виробники автомобілів. Тому можна навіть не сумніватися, що автономний транспорт протягом найближчих 5-10 років з'явиться на вулицях наших міст.
Як це працює?Як це працює?
І що можемо йому допомогти?
Водій - за те, що не взяв керування в свої руки в критичний момент?
Виробник автомобіля - за те, що не «навчив» машину гальмувати або об'їжджати перешкоду?
А може розробник ПЗ - адже, фактично, саме він і повинен був «вчити» автомобіль?
Або інтернет-провайдер - за те, що не забезпечив належну швидкість передачі даних і автомобіль вчасно не дізнався з «хмари», що через 2 км на нього чекає зледенілий поворот?
Як автомобіль повинен знати, що ще вчора по одній дорозі можна було проїхати, а вже сьогодні вона закрита на ремонт?
Ще один нюанс: а куди водієві подіти руки?
Згадайте: немає керма - де подіти руки?