

- Конструкція і принцип роботи магнітних приводів
- Типи магнітних приводів
- Коаксіальний магнітний привід
- Аксіальний магнітний привід
- Лінійний магнітний привід
- підсумки
- Додаткові ресурси з моделювання магнітних приводів в середовищі COMSOL Multiphysics
Магнітні приводи являють собою безконтакні механізми для перетворення крутного моменту в швидкість переміщення, використовуючи постійні магніти або електромагніти. Вони застосовуються в різних поновлюваних джерелах енергії і легко погоджуються з технічними параметрами електромагнітного генератора, підвищуючи тим самим ефективність джерел вітрової енергії, приливної енергії океану, і Маховиковим накопичувачів енергії. На відміну від своїх механічних аналогів, магнітні приводи мають внутрішній захист від перевантажень, мають високу надійність за рахунок функціонування при відсутності тертя, і не вимагають мастила. Сьогодні ми розглянемо, яким чином моделювати магнітні приводи в 2D- і 3D-випадках за допомогою середовища COMSOL Multiphysics.
Конструкція і принцип роботи магнітних приводів
Типовий магнітний привід складається з трьох роторів з різним числом пар магнітних полюсів, розділених невеликим повітряним зазором. Сталеві феромагнітні полюса (середній ротор) модулюють магнітні поля, що породжуються внутрішнім і зовнішнім роторами і створюють просторові гармоніки в повітряних зазорах. Модульовані магнітні поля за допомогою сталевих полюсів взаємодіють з магнітним полем на іншій стороні для передачі крутного моменту.
На малюнку нижче, приведена ілюстрація принципу дії типового магнітного приводу. Для простоти і наочності ми вибрали конфігурацію лінійного магнітного приводу. Принцип дії залишиться тим же і в разі магнітного приводу. У даній конфігурації, модель містить 11 пар полюсів на зовнішньому роторі, 4-х пар полюсів у внутрішнього ротора і 15 пар полюсів в середньому. Вони позначаються P_o, P_i і P_s, відповідно.
Чотири пари полюсів внутрішнього ротора породжують магнітне поле з переважанням 4ой гармоніки. Потім дане поле модулюється 15 парами сталевих полюсів для генерації поля з домінуванням одинадцятий гармоніки. Промодулірованной поле взаємодіє з основною одинадцятий гармонікою поля, порушеної зовнішнім ротором для передачі крутного моменту. Це викликає кручення, яке визначається ступенем узгодження гармонійної компоненти поля від зовнішнього ротора з гармонійної компонентою, створюваної промодулірованним полем від внутрішнього ротора.
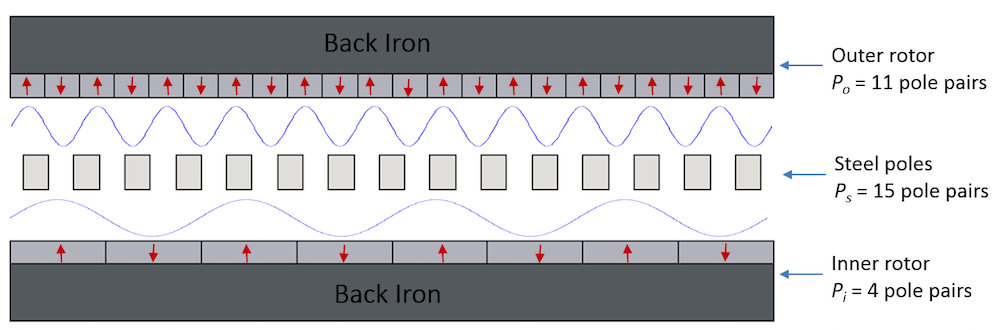
Схема, що зображає компоненти лінійного магнітного приводу. Червоні стрілки вказують напрямок намагніченості постійних магнітів. Магнітні поля породжуються внутрішнім і зовнішнім роторами представлені у вигляді блакитних кривих. Повітряний проміжок між роторами на малюнку для наочності представлений не в реальному масштабі.
З метою досягнення максимальної потужності крутного моменту, число пар полюсів кожного з роторів мав би підпорядковуватися наступному співвідношенню:
P_o = P_s -P_i
Співвідношення між парами полюсів і кутовий швидкістю для всіх трьох роторів при максимальній передачі крутного моменту задається виразом:
\ Omega_i = \ frac {P_s} {P_s -P_o} \ omega_s - \ frac {P_o} {P_s -P_o} \ omega_o
де \ omega_i, \ omega_o і \ omega_s позначають швидкість внутрішнього, зовнішнього роторів і сталевих полюсів, відповідно. Якщо середній ротор залишається нерухомим, то співвідношення між швидкістю і числом пар полюсів стає:
\ Omega_o = - \ frac {P_i} {P_o} \ omega_i
Кращою комбінацією для P_i, P_s і P_o є та, при якій пульсації в моменті, що крутить будуть мінімальні. Такі пульсації пов'язані, головним чином, зі зчепленням крутного моменту, що створюється в результаті взаємодії між постійними магнітами двигуна і сталевими полюсами. Параметр, який використовується для мінімізації зчеплення моменту називається коефіцієнтом зчеплення. Він дається наступним виразом:
C_f = \ frac {2P_i * P_s} {LCM (2P_i, P_s)}
де LCM є найменше спільне кратне (LCM - least common multiple). Мінімум зчеплення моменту досягається при C_f = 1. У всіх наведених тут прикладах, дана умова вважається виконаним, і, сталеві феромагнітні полюса зберігають свою нерухомість.
Типи магнітних приводів
Магнітні приводи можна розділити на при типу за принципом їх дії: лінійні, коаксіальні і аксіальні магнітні приводи (ЛМП, КМП і АМП, відповідно). У разі ЛМП або КМП, що генерується магнітне поле, як правило, направлено радіально (всередину або назовні) по відношенню до осі вала. Однак, в разі АМП, силові лінії створюваного магнітного поля паралельні осі ротора. В даному топіку, ми представимо приклади для всіх трьох типів магнітних приводів, використовуючи середу COMSOL Multiphysics.
Коаксіальний магнітний привід
Як показано на малюнку нижче, коаксіальний магнітний привід складається з трьох концентричних роторів з различающимся числом пар полюсів. Внутрішній ротор містить вісім постійних магнітів (ПМ) і магнітопровід з м'якого заліза, який формує розходиться з центру 2-х пар полюсів на роторі (2 збірки по 4 ПМ), зовнішній потік. Зовнішній ротор містить 20 ПМ і ще один муздрамтеатр з м'якого заліза, яка формує потік, що сходиться всередину до осі ротора з 5 пар полюсів. На зовнішньому і внутрішньому роторі, постійні магніти впорядковані в конфігурацію у вигляді магнітної збірки Халбаха . Сім сталевих блоків (наконечників), і таке ж число проміжків між ними, складають нерухоме середнє кільце і формують, таким чином, нерухомий ротор з 7 парами полюсів.
Зліва: Схема коаксіального магнітного приводу, що показує внутрішній і зовнішній ротори, і нерухомі сталеві полюса. Червоні стрілки вказують напрямок намагніченості постійних магнітів. Постійні магніти впорядковані таким чином, що внутрішній ротор служить розсіює фокусом, направленогоназовні потоку е / м поля, а зовнішній ротор діє, як концентратор потоку всередину. Справа: Магнітна індукція (її норма), компонента магнітного векторного потенціалу (Az), радіальна компонента вектора магнітної індукції (Br) і графічне відображення сітки розбиття, з 1-го по 4-ий квадрант, відповідно.
В даному прикладі, число пар полюсів вибрано так, щоб передавальне відношення для приводу склало 5: 2 і досягався мінімум зчеплення крутного моменту при коефіцієнті зчеплення дорівнює одиниці. У середовищі COMSOL Multiphysics 2D поперечний переріз коаксіального магнітного приводу моделюється, використовуючи інтерфейс обертаються механізми, Магнетизм в модулі АС / DC. Оскільки модель складається з трьох окремих частин, нам необхідно сформувати об'єднання цих частин, для чого буде потрібно доопрацювати геометрію моделі використовуючи функцію Формування Складання, так що в областях повітряних зазорів з'являться дві окремі тотожні пари.
Ми застосовуємо нелінійну модель матеріалу в області м'якого заліза, використовуючи для цього криві намагніченості BH / HB. Однак, нерухомі сталеві полюсні наконечники моделюються як лінійний матеріал з відносною магнітною проникністю \ mu_r = 4000. Обертання внутрішнього і зовнішнього роторів можна визначити в вузлі Задана швидкість обертання. Осьової крутний момент обох роторів розраховується методом тензора напружень Максвелла за допомогою ініціалізації вузла Розрахунок Сили (Force Calculation).
Анімація, що зображає поверхневий графік магнітної індукції і контурний графік компоненти магнітного векторного потенціалу, A_z. Показується обертання за годинниковою і проти годинникової стрілки зовнішнього і внутрішнього роторів, відповідно, поряд із взаємодією полів.
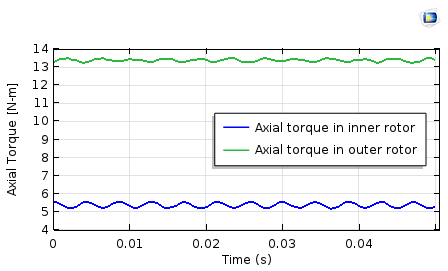
Профіль осьового крутного моменту на внутрішньому і зовнішньому роторах. Пульсації крутного моменту вище на внутрішньому роторі (менше число пар полюсів).
Ви можете скачати файли моделі даного прикладу з нашої галереї Додатків. Там ви знайдете файл з геометрією моделі, файл COMSOL-моделі, а також файл-опис в форматі PDF з покрокові інструкції.
Аксіальний магнітний привід
Коли мова заходить про аксиальном магнітному приводі, то його принцип дії виявляється таким же, що і у коаксіальних магнітних приводів описаних вище. У даній конструкції, ротори укладаються один над одним в осьовому, а не в радіальному напрямку, розділені невеликими повітряними зазорами. Оскільки поверхня взаємодії магнітного поля більше, а довжина всіх трьох роторів одна і та ж, АМП забезпечує більш високу потужність крутного моменту в порівнянні з КМП. 3D конструкція типового аксіального магнітного приводу зображена на малюнку нижче зліва.
Зліва: Схема AMGs, яка зображує малооборотних ротор, високооборотний ротор і нерухомі сталеві полюса. Чорні стрілки вказують напрямок намагніченості постійних магнітів. Справа: Розрахунок, який демонструє вектор магнітної індукції (поверхневий графік інтенсивності поля з колірним контрастом в логарифмічному масштабі і стрелковідное відображення векторного поля) і вид сітки розбиття.
Завантаживши навчальну модель , Ви зможете повністю дослідити всі подробиці настройки даної моделі. Даний докладний приклад включає файли моделі для стаціонарного дослідження, використовуючи параметричну розгортку, і повне 3D моделювання в часі аксіального магнітного приводу з використанням інтерфейсу обертаються механізми, Магнетизм. Деякі з результатів моделювання дослідження стаціонарного і тимчасово-залежного режимів, представлені тут.
Анімація, показує поверхневе зображення векторного поля магнітної індукції: розподіл норми і стрелковідное напрямок вектора. Показується обертання за годинниковою і проти годинникової стрілки високооборотного і низкооборотного роторів, відповідно, поряд із взаємодією полів.
Передача крутного моменту в магнітних приводах, як не дивно, може бути отримана, при виконанні стаціонарних досліджень для різних кутових позицій між високошвидкісним і низькошвидкісним роторами. Зміна кутовий позиції можна проводити за допомогою параметричної розгортки в стаціонарному дослідженні. Однак, при моделюванні перехідних процесів, вам буде потрібно налаштувати тимчасово-залежне дослідження. Досить цікаво, що ви отримаєте ідентичні результати для передачі крутного моменту в обох цих дослідженнях.
Профіль осьового крутного моменту на внутрішньому і зовнішньому роторах. Зліва: Стаціонарне дослідження і параметричне дослідження. Справа: Рішення в тимчасовій області. Пульсації крутного моменту вище на високооборотному роторі (з меншим числом пар полюсів).
Лінійний магнітний привід
Лінійні магнітні приводи використовуються в цілому ряді програм. У нафтової і газової промисловості, наприклад, вони забезпечують передачу для свердловинних бурових моторів, перетворюючи високу швидкість в високий крутний момент, що є необхідним при бурінні. Такі приводи інтегруються до складу вільно-поршневих генераторів для лінійних синхронних двигунів в електрорушійної засобах пересування, а також для генерації електрики в додатках по використанню енергії природних хвиль (морських, океанських, приливних, вітрових і т.д.).
Конструкція типового лінійного магнітного приводу показана на наступному малюнку. Привід складається з трьох роторів з двома лінійно переміщаються напрямними (званими також роторами), з нерухомими сталевими полюсами між ними. Оскільки геометрія симетрична вздовж азимутального напрямку, ми можемо вирішувати модель використовуючи 2D-осесиметричних геометрію. У прикладі представленому тут, передбачається, що всі ротори мають одну і ту ж довжину і, що вони нескінченні в напрямку руху. Ця умова означає, що нам потрібно змоделювати лише сектор геометрії.
Модель налаштовується в середовищі COMSOL Multiphysics, використовуючи інтерфейси Магнітні поля і Рухома Сітка. Через те, що вбудованих періодичних граничних умов для лінійної періодичності немає, ми створюємо для користувача періодичні граничні умови за допомогою оператора Загальна екструзія і для низько- і для високоскостной направляючої. Для відповідного прикладу, погляньте на один з попередніх топіків .
Для розрахунку електромагнітної сили зчеплення між низько- і високошвидкісний напрямними, ми використовуємо моделювання в тимчасовій області. Ви можете завантажити файл даної моделі і пов'язану з нею документацію з Галереї Додатків.
Зліва: Конструкція ЛМП, що показує низько- і високошвидкісну напрямні, і нерухомі сталеві полюса. Чорні стрілки вказують напрямок намагніченості постійних магнітів. Справа: Норма магнітної індукції (поверхневий графік) і контурний графік магнітної індукції. Показана радіальна компонента поля.
Z-компонента електромагнітної сили на високошвидкісний направляючої (зліва) і малої направляючої (праворуч).
Анімація, що представляє поверхневий графік норми вектора магнітної індукції і контурний графік її радіальної компоненти. Показуються, лінійне переміщення обох низько- і високошвидкісний - напрямних, а також поля взаємодії.
підсумки
У сьогоднішньому топіку, ми представили основні типи магнітних приводів, які ви можете змоделювати за допомогою середовища COMSOL Multiphysics і відповідних інтерфейсів Модуля AC / DC. Крім цього, використовуючи стаціонарне дослідженні і розрахунок в тимчасовій області, ми продемонстрували в порівнянні передачу крутного моменту між роторами.
Для коаксіальної і аксіальної конфігурацій, ви можете безпосередньо налаштувати модель за допомогою інтерфейсу, що обертаються механізми, Магнетизм. Однак, для лінійних магнітних приводів, вам буде потрібно з'єднати інтерфейси Магнітні поля і Рухома Сітка і доопределить лінійні періодичні граничні умови.
Додаткові ресурси з моделювання магнітних приводів в середовищі COMSOL Multiphysics
- Чи готові випробувати приклади наших моделей самостійно? Скачайте їх звідси:
- Дізнайтеся докладніше про рекомендаціях з моделювання обертових електричних механізмів в середовищі COMSOL Multiphysics з даних топіків:
- Подивіться інші топіки, представлені в нашій серії Електромагнітні пристрої
- Хочете почати моделювання магнітних приводів в середовищі COMSOL Multiphysics або у вас виникли додаткові питання по поточному процесу моделювання? Будь ласка, зв'яжіться з нами