

Ibrahim Kamal (IKALOGIC)
Розглянутий безконтактний тахометр - це компактний пристрій на мікроконтролері ATMega48 виробництва компанії Atmel , Що дозволяє вимірювати високі швидкості обертання безконтактним способом. Для вимірювання використовується ІК сенсор (оптопара, ІК світлодіод і ІК фотодіод в одному корпусі). Висновок даних здійснюється на двухстрочний символьний ЖК дисплей на базі контролера HD44780 .

Принцип роботи
ІК сенсор (оптопара), що представляє собою мініатюрний компонент з ІК світлодіодом і фотодіодом в одному корпусі, посилає ІК випромінювання на обертовий механізм (вал, ротор двигуна), на якому повинна бути невелика відображає наклейка.
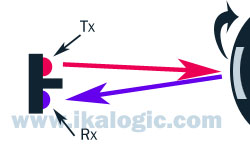
Завдяки цій наклейці, кожен оборот валу викликає поява відбитого імпульсу ІК випромінювання. Використовуваний сенсор виробництва компанії Vishay Semiconductor має маркування TCND-5000 .

Даний сенсор був обраний після тестування еквівалентних продуктів, так як його корпус забезпечував оптичну ізоляцію передавальної і приймальні частини, а ІК світлодіод витримує великі струми, що дозволяє проводити вимірювання на великих відстанях.
Таким чином, використовуючи оптопару ми можемо підрахувати час повного обороту валу, а далі, знаючи час (позначимо цей час T в секундах), ми можемо вирахує кількість оборотів в хвилину, використовуючи простий вислів 60 / T.
Отримання даних від сенсора
Для зниження вартості пристрою і складності збірки, а також для підвищення гнучкості системи, ми безпосередньо підключимо ІК сенсор до мікроконтролеру і програмно реалізуємо всю обробку одержуваного сигналу. Відразу варто зауважити, що це не так просто, так як отримується з ІК фотодіода сигнал містить шуми, а зовнішнє освітлення постійно надає на нього вплив. Таким чином, проблема полягає в тому, щоб розробити пристрій з автоматичною адаптацією до зовнішнього освітлення та відстані до об'єкта вимірювання.
На малюнку нижче зображено діаграма аналогового сигналу від ІК сенсора (фотодіода)

Так як сигнал має шуми, при кожному визначенні наявності і відсутності імпульсу (наявність імпульсу говорить про те, що вал обертається і сенсор «бачить» відображає наклейку), велика кількість коливань «вводить в оману» мікроконтролер. Крім того, ці фактори не дозволяють використовувати вбудований в мікроконтролер аналоговий компаратор, і нам необхідно ввести обробку аналогового сигналу перед кожною процедурою підрахунку циклів.
Рішення було знайдено в оцінці середньої інтенсивності, засновану на максимальному і мінімальному значенні інтенсивності сигналу від сенсора, і включенням гістерезису в районі середньої інтенсивності. Гістерезис використовується для запобігання багаторазового рахунку циклів зашумленних імпульсів. Малюнок нижче пояснює роботу такого алгоритму.
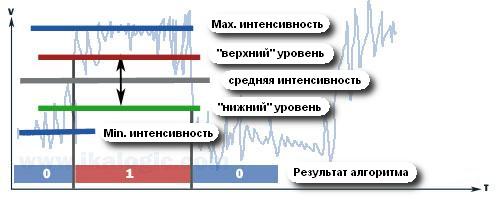
Коли сигнал наростає від низького стану (відсутнє відображення від наклейки на валу) до високого (відображення ІК імпульсу), алгоритм візьме до уваги цей імпульс високого рівня лише після того, як він перетне «зростаючий рівень» гистерезиса, і прийме до уваги низький рівень лише після того, як сигнал перетне «спадаючий рівень» гистерезиса. Такий алгоритм дозволяє уникнути помилок обчислень, що викликаються гучним сигналом.
Принципова схема пристрою
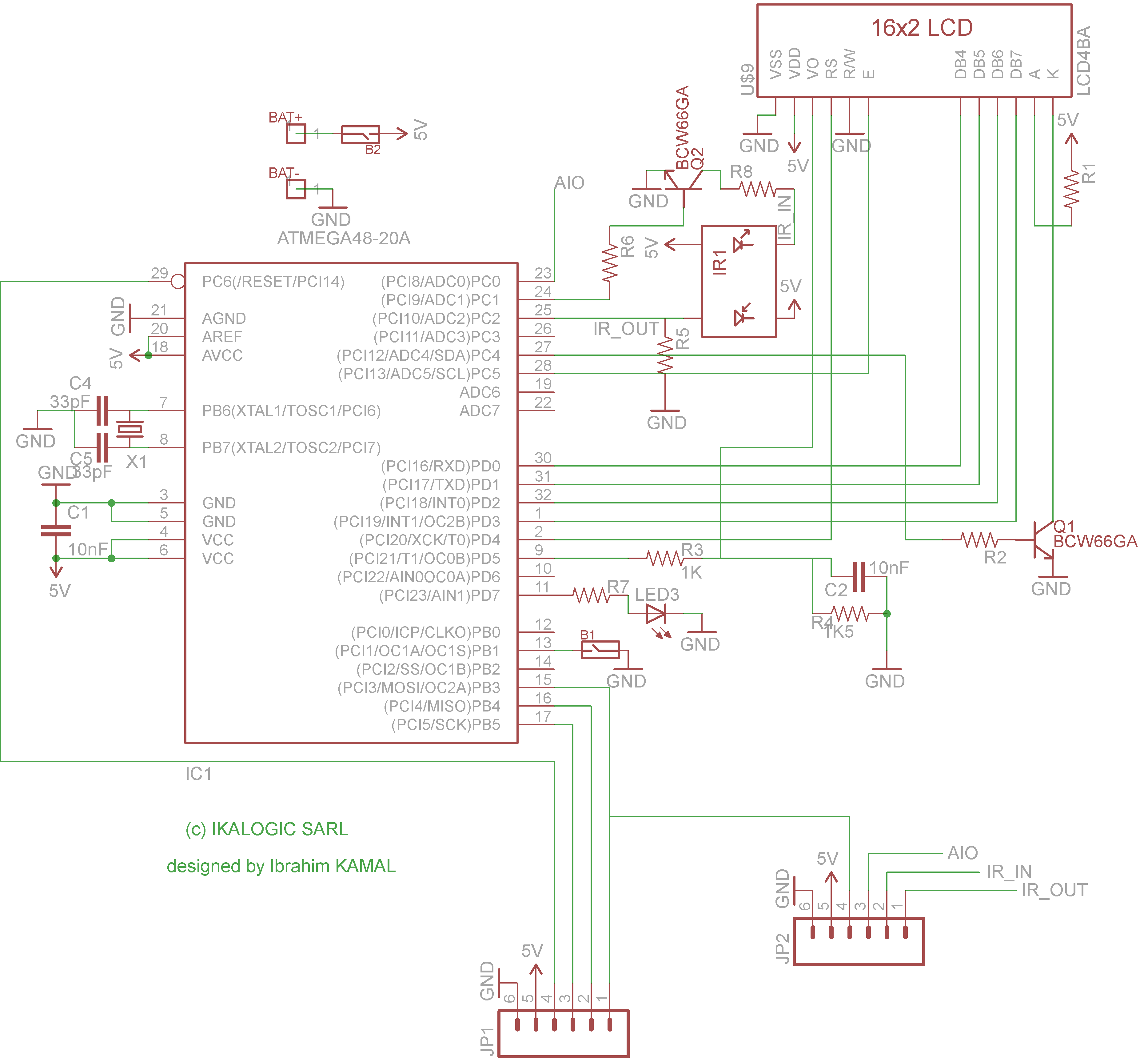
Натисніть для збільшення
Схемотехнічне рішення дуже просте і компактне (завдяки використанню мініатюрного сенсора), не містить дорогих компонентів. Пристрій працює від трьох батарей типу AAA.
Як ви, напевно, помітили, відсутня потенціометр регулювання контрастності дисплея (що також дозволяє зменшити розмір пристрою). Це можливо завдяки програмної реалізації алгоритму автоматичного підстроювання контрастності в залежності від рівня напруги живлення із застосуванням ШІМ і фільтра низьких частот на елементах R3, R4 і C2. Користувачі можуть ознайомитися з текстом алгоритму в вихідному коді ПО мікроконтролера в другій частині статті.
Роз'єм JP1 призначений для внутрисхемного програмування мікроконтролера. Роз'єм JP2 призначений для підключення додаткового призначеного для користувача датчика.
Список використаних компонентів
позначення
в схеміНайменування, номінал
IC1 Микроконтроллер ATmega48 Q1, Q2 Транзистор BCW66G C1, C2 10 нФ C4, C5 33 пФ X1 Кварцовий резонатор 20 МГц R1, R2, R7 470 Ом R3 1 кОм R4 1.5 кОм R5 1 МОм R6 110 Ом R8 70 Ом LED3 Світлодіод IR1 Оптопара TCND-5000 B1 Кнопка B2 Вимикач живлення JP1 роз'єм внутрисхемного програмування JP2 роз'єм розширення
Демонстрація роботи безконтактного тахометра на мікроконтролері AVR
під другій частині статті розглянемо конструкцію приладу і основні моменти в програмному забезпеченні мікроконтролера, включаючи аналого-цифрове перетворення та організацію обміну даними з РК дисплеєм.